Mein Quadrocopter Projekt X525
Bei R³ckfragen andy.oldy@gmx.de
Update 21.03.2013 Einstellwerte KK2.0
Zur³ck zur Quadrocopter Hauptseite
Die Lieferung
Zusammenbau des Rahmens
Programmieren der Regler
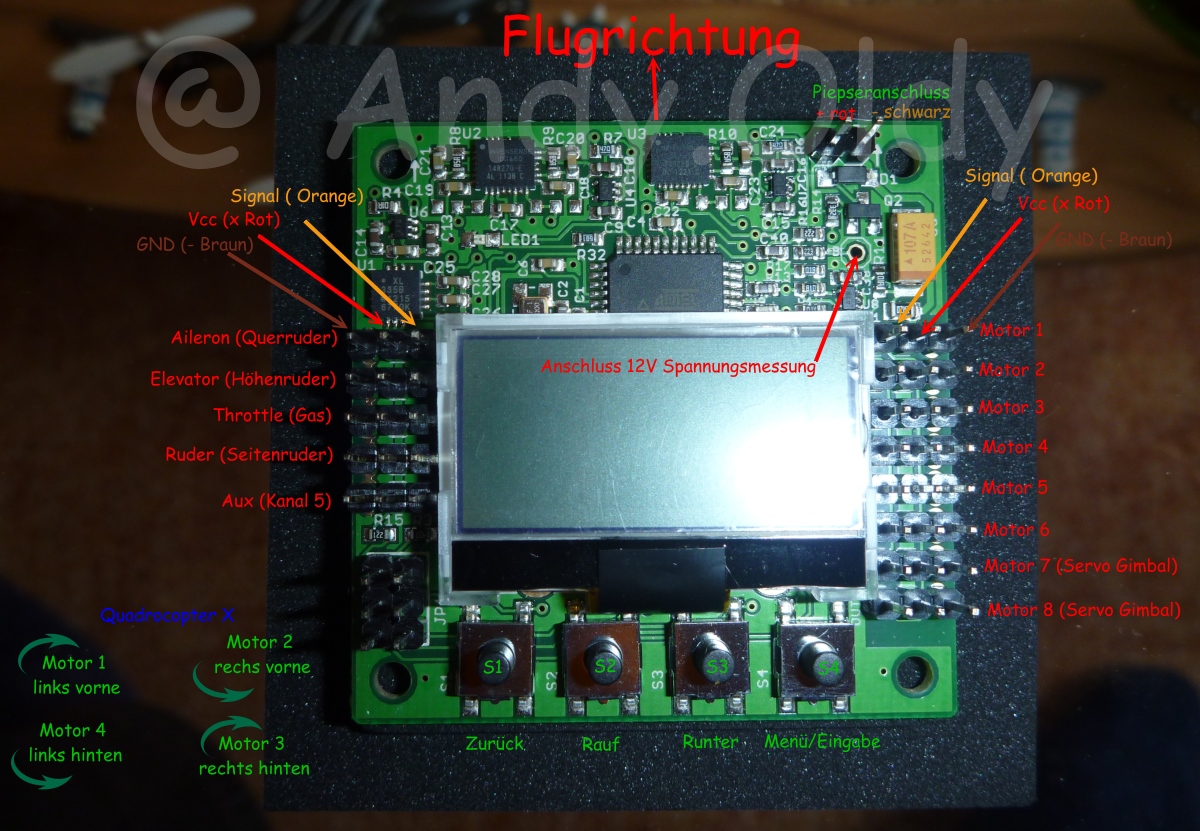
KK Board Ansicht
Programmierung der Platine
Fernsteuerung testen
Gyros testen
Einstellung der KK Platine
Einstellung der Fernbedienung
Propeller Montage
Einstellungsflug
Modifikationen
![]() Propellerwuchtmaschine
Propellerwuchtmaschine
![]() Umr³stung auf KK2.0
Umr³stung auf KK2.0
Ich nenne ihn mein Straps-Copter
Weil ich so viele Kabelbinder (Strapse) verbaut habe ;-)
Dezember 2011
Der Copter nennt sich X525 V3 QuadCopter Fiber Glass
Hat alles was ein Quadrokopter ben÷tigt,
einen "Rahmen", 4 Brushlessmotoren, 4 Regler und eine recht einfach aufgebaute KK Multikopter Hauptplatine.
Diese Platine soll recht einfach im Umgang sein (Einstellung des Copter)
Ich habe alle Teile bei http://www.goodluckbuy.com/ gekauftl.
Innerhalb von 14 Tagen war alles hier. Geliefert wurde per DSL Express
Das Paket ist heute angekommen. 23.- Euro Einfuhrsteuer musste ich am DHL Boten bezahlen


Die Motoren und der Regler

Nat³rlich war keinerlei Anleitung vorhanden. Also Fotos auf der Webseite rausgesucht und erstmal den Rahmen zusammengebastelt.
Hier ein Video davon
https://www.youtube.com/watch?v=p9oYwQyWYng&list=PLK9O0QvLqFPCw7M2Kgt2WE3Q4RioV0uwL
Der Aufbau ging trotz der fehlenden Anleitung ganz gut. Man ben÷tigt zusõtzlich nur Schraubensicherungslack.
.JPG)
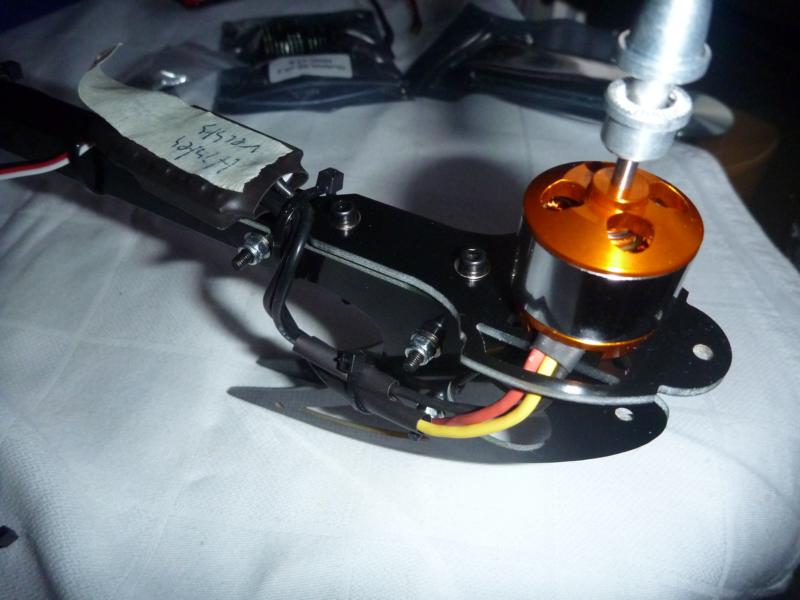
Die montierten Motoren
.JPG)
Der Landefu▀ mit der Dõmpfungs-Feder und den 2 Gummit³llen zur fixierung
.JPG)

Das Verdrahten der Regler an den Motoren.
Am besten man markiert sich auf jeden Arm die Drehrichtung und die Position des Motors (vorne, hinten, links, rechts)
Wie die Kabel angeschlossen werden ist eigentlich egal, aber die Motoren m³ssen eine bestimmte Drehrichtung haben.
Um die Motordrehrichtung zu õndern m³ssen einfach nur 2 Kabel vertauscht werden.
Drehrichtung der Motoren siehe weiter unten
Sind die Motoren alle richtig verdrahtet m³ssen alle 4 Regler programmiert werden.
Wenn man keine Programmierkarte hat muss man es manuell machen:
Regler folgenderma▀en einstellen: (Empfohlene Einstellung aus den Copterforum)
1. Bremse: Off
2. Akku Typ: Lipo
3. Cut Off Modus: Soft Cut
4. Abschaltspannung: Medium 3,15V
5. Start Modus: Normal
6. Timing: High
Zum Einstellen den Regler am Empfõngerkanal des Gas-Weges anklemmen ( bei mir Kanal 3).
▄ber den Motor gibt der Regler die T÷ne von sich.
Sender einschalten,
Gaskn³ppel ganz nach vorne ( Vorne =Vollgas, eventuell den Kanal auf Reverse stellen),
Akku anklemmen.
Hier ein Video der Einstellung f³r diese Regler
Nach 2 Sekunden ert÷nt vom Motor ein Piep---Piep
Nach 5 Sekunden gibt es eine kurze Melodie nun ist man im Programmiermen³
Nun folgen 8 Tonfolgen hintereinander
Siehe Tabelle (Pos. 1-Pos.8)
Will man eine Position programmieren muss man nach der jeweiligen Tonfolge den Gaskn³ppel nach hinten bewegen.
Nun erfolgt die "Programmiertonfolge".
Sobald die zu programmierende Tonfolge ert÷nt, den Gaskn³ppel nach vorne betõtigen.
Es erfolgt eine kurze Melodie als Bestõtigung.
Ein Beispiel:
Man will die Abschaltspannung auf "mittel" stellen:
Im Programmiermodus (siehe oben)
wartet man solange bis es 4x piept ( Programmierung der Abschaltspannung).
Nun den Gaskn³ppel nach hinten ziehen,
dann warten bist es 2x piept ( Mittel) und Gaskn³ppel nach vorne dr³cken.
Eine Melodie bestõtigt die Programmierung
Dann ist man wieder im Programmiermodus und man kann das nõchste programmieren,
mit Exit ( 2x lang), dann Kn³ppel nach hinten, verlõsst man das Programmiermen³.
|
Gas vorne |
Gas hinten |
||||
|
Pos |
Bezeichnung |
Piep T÷ne |
1x Piep |
2x Piep |
3xPiep |
|
1 |
Bremse |
1x kurz |
Aus |
An |
- |
|
2 |
Akku Typ |
2x kurz |
LiPo |
NiMH |
- |
|
3 |
Cut-Off Modus |
3x kurz |
Leistung reduzieren |
abschalten |
- |
|
4 |
Abschaltspannung |
4x kurz |
Gering 2,85V bei Lipo |
Mittel 3,15V bei Lipo |
Hoch 3,3V bei Lipo |
|
5 |
Start Modus |
1x lang |
Normal |
Soft |
Super Soft |
|
6 |
Timing |
1x lang |
Gering |
Mittel |
Hoch |
|
7 |
Reset |
1x lang |
Werkseinstellung |
|
|
|
8 |
Exit |
2x lang |
|
|
|
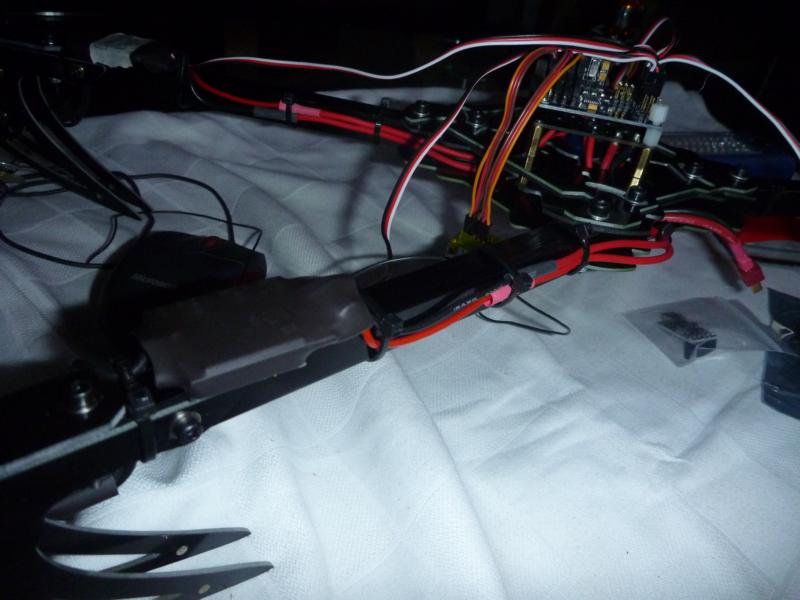
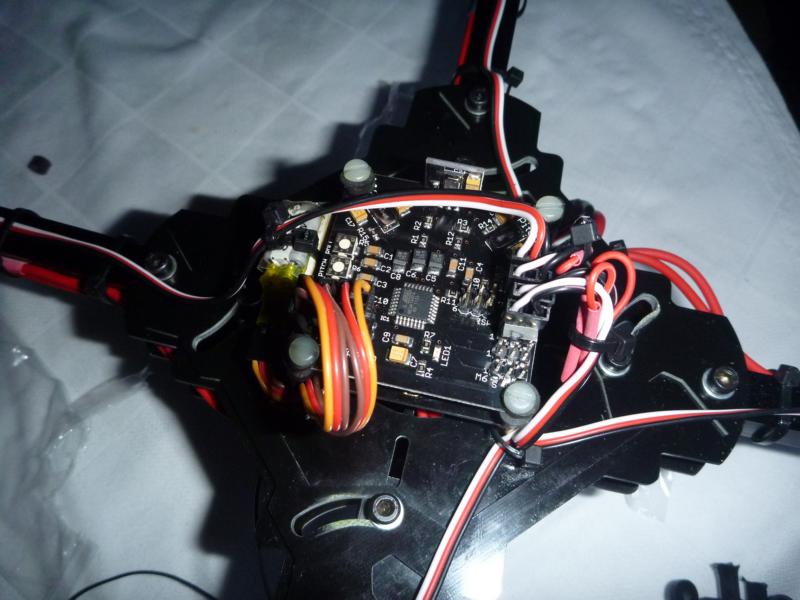
.JPG)
Unten die Stromverteilungsplatine
Oben das KK Board es sollte etwas abgedõmpft montiert werden damit nicht alle Vibrationen aufs Boad ³bertragen werden.
Ich habe es mit Gummit³llen befestigt
Aber nicht zu weich lagern!
Hier die Platine und die Anordnung und Drehrichtung der Motoren
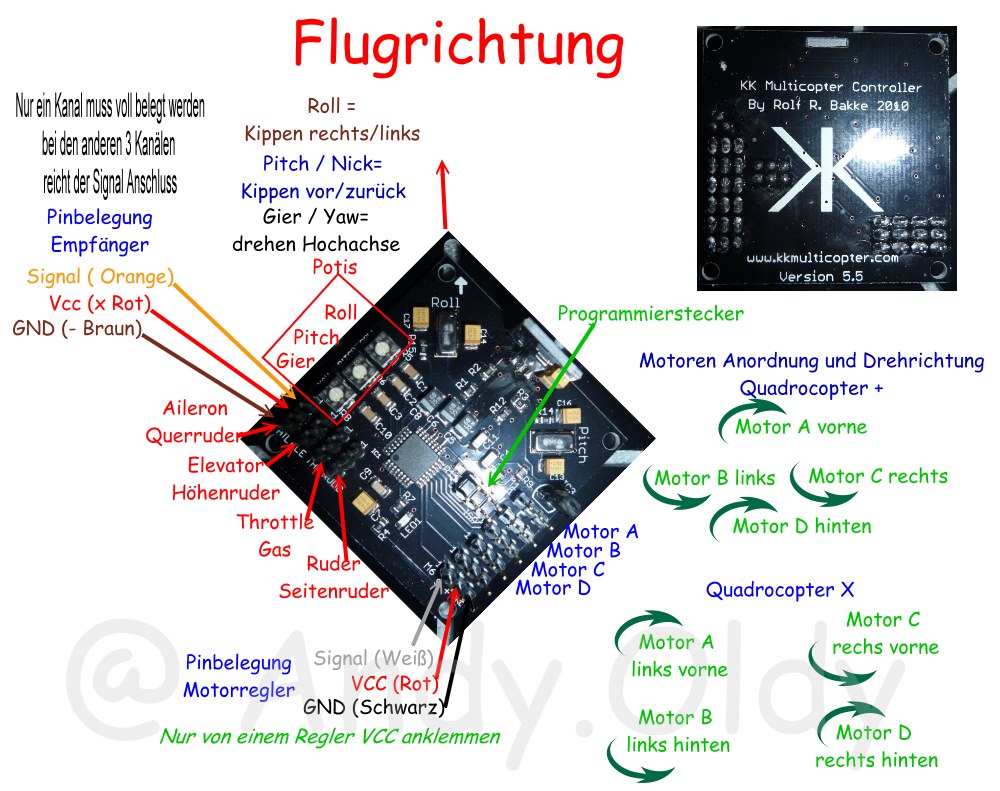
Die Platine ist recht einfach aufgebaut. Man kann sie nicht erweitern und es gibt 3 Potis zum einstellen der Gyroempfindlichkeit.
Es gibt keine Schnittstelle zum PC nur eine um den Prozessor zu flashen
Nun habe ich alles grob verkabelt
Hier drauf achten das die Landef³▀e durch die Feder nahgeben gen³gend spielraum dem Motorkabel geben
.JPG)
Beim Verlegen darauf achten das die Arme schwenkbar sind ,also gen³gend "Luft" f³r die Kabel lassen
.JPG)
Copter ausgeklappt
.JPG)
Copter zusammengeklappt
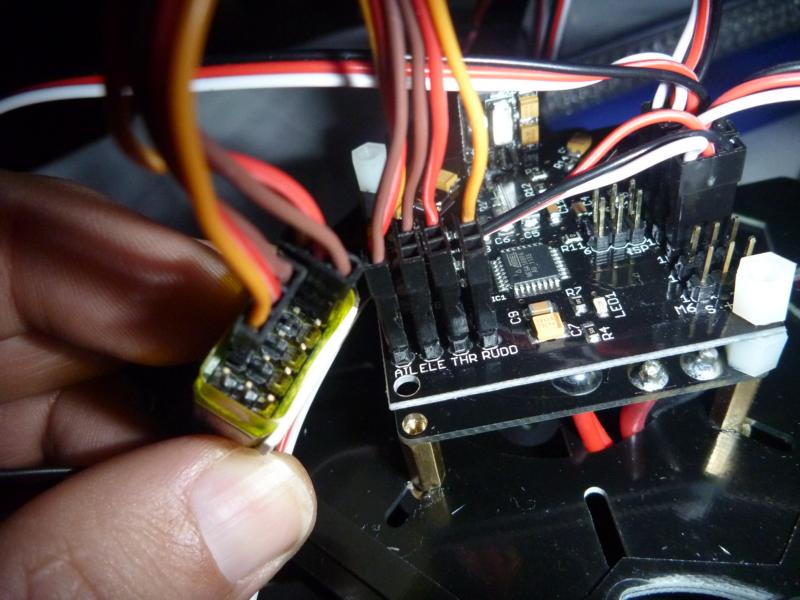
Empfõngeranschluss
Kanal 1 am Empfõnger mit Kanal 1 vom Board 1zu 1 verbinden.
Kanõle 2-4 vom Empfõnger mit Adapterkabel (quer auf die Signal Pins aufstecken) mit Kanal 2-4 des Boards verbinden ( Kabel zeigt nach oben auf den Signal Pin)
Bei anderen Fernsteuerung kann die Belegung auch anders sein!
Um den Akku anzuschlie▀en brauchte ich einen anderen Stecker

Zuerst den Programmieradapter installieren ( siehe Anleitung des Adapters)
KK Multicopter Flash Tool hier herunterladen
Dieses Tool funktioniert nicht mit dem beigef³gten Programmieradapter,
Update 09.01.2012
Im Forum hat Rainer62 herausgefunden wie man auch mit diesem Programmer
das Board Programmiert hier gehts zum Forumsbeitrag
Update 19.02.2012
Mit das Flash Tool ab V. 0.50 geht es auch mit dem beigef³gten Programmieradapter.
Als Programmer hier folgendes auswõhlen: Any usbap clone with correcr VID/PID (asbap-clone)
Ich habe mir zum Programmieren den III KK Board AVR USBasp ISP Adapter gekauft
F³r Windows XP Syteme sollte man sich hier den Treiber herunterladen. (Nicht den von der E-Bay Auktion)
Da der 6 polige Adapter nicht auf die Platine gesteckt werden kann (der Stecker ist zu gro▀),
mu▀ mit einem Dremel, die Seite wo das rote Kabel ist, etwas abgeschliffen werden.

Das Programm lõuft nicht auf meinem Win 7 64 Bit PC, aber mit dem Laptop lõufts.
Auf dem PC muss Java installiert sein
Update 19.02.2012
Mit das Flash Tool ab V. 0.50 geht es auch mit Win 7 64 bit
Heruntergeladene Datei entpacken.
Das Programm KKMulticopterFlashtool starten.
Unter Einstellung die Sprache wõhlen.
Nun den vorhandenen Programmieradapter auswõhlen.
Das Board auswõhlen
und die zu programmierende Software auswõhlen.
Programmieradapter aufstecken,
Programmiervorgang starten
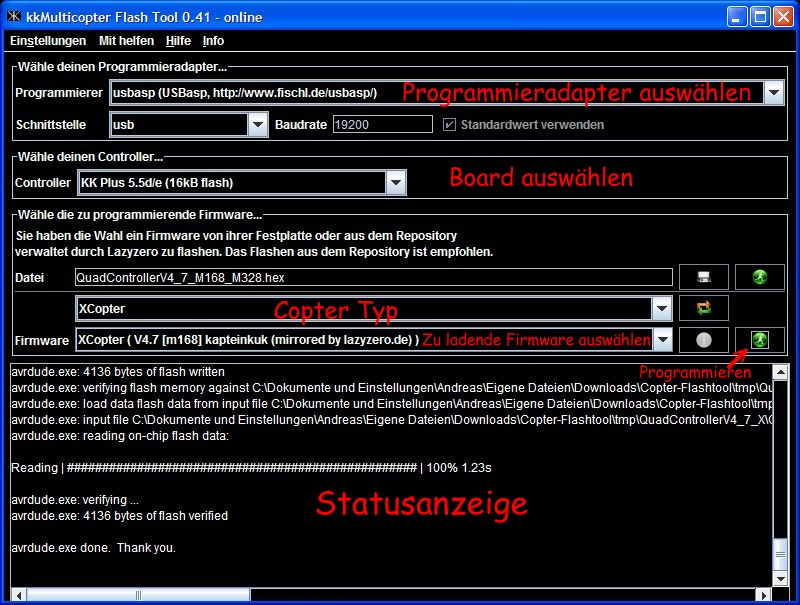
Meine Einstelllungen:
Unter Programmierer: usbasp
Schnittstelle: usb
Baudrate: 19200
Controller: KK Plus 5.5d/e (16kB flash)
Typ: XCopter
Firmware: Quadrocopter V4.7
Dann auf Programmieren klicken und unten im Statusfenster solltet ihr dann den Programmiervorgang sehen.
Ein- und Ausschalten der Platine,
Propeller sind noch nicht angeschraubt!
Platine einschalten:
Gas Kn³ppel nach unten rechts halten bis die blaue LED dauerhaft leuchtet.
Gas Kn³ppel nach unten links halten bis die blaue LED erlischt.
Eventuell muss der Gaskn³ppel invertiert werden.
( Wenn man die Karte mit Kn³ppel oben links scharf schalten kann)
Gasweg einstellen
Propeller sind noch nicht angeschraubt!
Yaw Poti auf 0 (Rechtsanschlag)drehen
Gaskn³ppel der Fernsteuerung auf "Vollgas" stellen
Fernsteuerung einschalten
Akku an Copter anklemmen
Sobald es 2 x Piept Gaskn³ppel zur³ck stellen. Fertig
Hier ein Video davon:
https://www.youtube.com/watch?v=MDDfc17vpxY&list=PLK9O0QvLqFPCw7M2Kgt2WE3Q4RioV0uwL
Poti Einstellung
Achtung Rechtsanschlag ist 0
(kann aber auch anders herum sein)
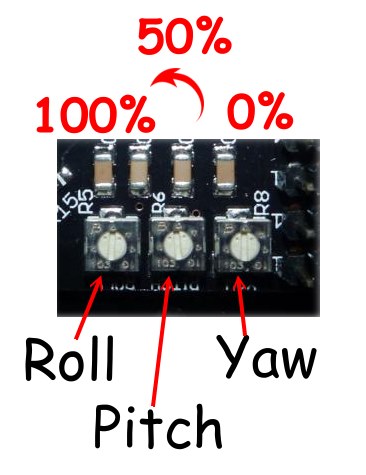
Bei Firmware 4.7 sollten die Potis folgenderma▀en eingestellt werden
(Empfohlene Einstellung aus den Copterforum)
Roll 45 %, Pitch 20% Yaw 75%
Fernsteuersignale testen
Propeller sind noch nicht angeschraubt!
Am Sender keine Mixer und auch kein Heli Programm verwenden.
Alles einschalten.
Etwas Gas geben, alle Motoren sollten nun in ihre richtige Richtung laufen.
H÷henruder nach vorne dr³cken, die hinteren Motoren m³ssen nun schneller drehen.
Querruderkn³ppel nach links dr³cken, die rechten Motoren m³ssen nun schneller drehen.
Seitenruder nach links dr³cken, die Motoren vorne links und hinten rechts m³ssen nun schneller drehen.
Wenn das so ist ist alles OK.
Wenn der Copter anderes Reagiert m³ssen eventuell die Servowege umgekerht werden.
Bei meiner Graupner Anlage musste ich alles Kanõle bis auf Gas umkehren.
Gyros auf Funktion testen
Propeller sind noch nicht angeschraubt!
Alles einschalten.
Etwas Gas geben, alle Motoren sollten nun laufen.
Copter nach vorne neigen,
der Copter muss dem entgegenwirken, d.h. die vorderen Motoren drehen schneller
und die hinteren Motoren langsamer.
Copter nach links neigen,
der Copter muss dem entgegenwirken, d.h. die linken Motoren drehen schneller
und die rechten Motoren langsamer.
Copter im Uhrzeigersinn drehen,
der Copter muss dem entgegenwirken, d.h. dieMotoren vorne links und hinten rechts drehen schneller
und die Motoren hinten links und vorne rechts drehen langsamer.
Dreht er falsch herum muss die Gyrowirkung geõndert werden.
Gyrowirkung õndern
Dies ist nur n÷tig wenn der Copter falsch reagiert
(Ich musste die Yaw Wirkrichtung õndern denn mein Copter drehte sich immer im Kreis)
Roll Poti auf 0 stellen.
Fernsteuerung einschalten
Akku anklemmen ,
LED blinkt 3x .
Nun den Kn³ppel der Fernbedienung bewegen dessen Gyro Wirkung umgekehrt werden soll.
LED blinkt schnell,
Akku abklemmen und Fernbedienung ausschalten
und Roll Poti auf die entsprechende Position zur³ckdrehen
Wenn alle Einstellungen erledigt sind kann man die Propeller montieren
Achtung die Propeller sollten wirklich vorher gewuchtet werden
Eine Unwucht kann das Lager, die Motorwelle oder den ganzen Motor zerst÷ren.
Weiter unten ist beschrieben wie die Propeller gewuchtet werden k÷nnen

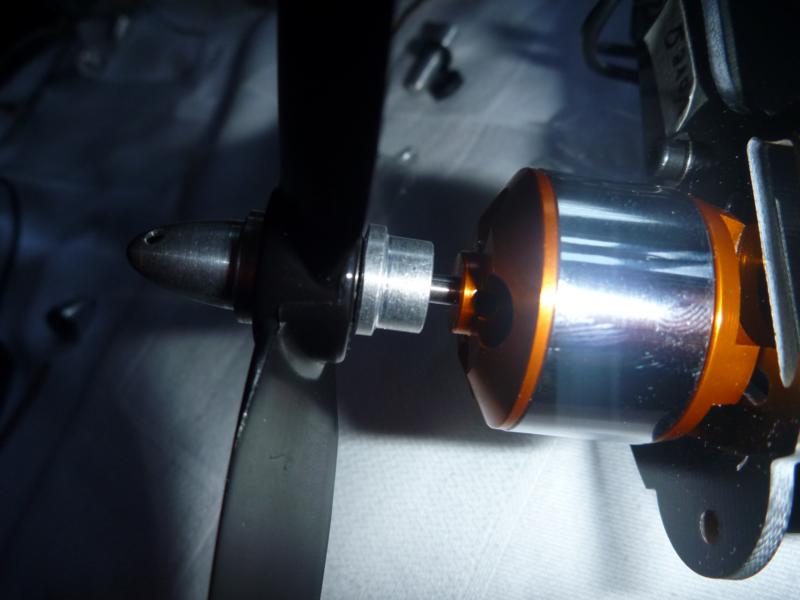
Hier sieht man ein Propeller f³r links drehenden Motor mit Adapterringe.
Wir ben÷tigen 2 Ringe der Gr÷▀e 5mm.

Die Gussnasen mit einem Messer entgraten

Auf beiden Seiten des Propellers diese Distanzringe einstecken


Die Propellermitnehmer aufstecken. Das kann etwas schwer gehen aber die Mitnehmer m³ssen ganz plan anliegen.
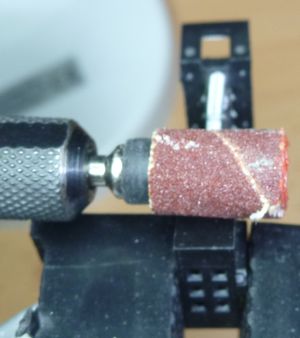
Die Mitnehmer haben eine nicht so ganz gute Qualitõt
Es befand sich teilweise ein Grat den man erst weg frõsen musste
damit der Mitnehmer auf die Welle passt


Die Propeller richtig fest anschrauben. Schraubensicherung dabei verwenden.
Darauf achten das an allen 4 Motoren der Mitnehmer in etwa gleicher h÷he sitzt.
Die Schrauben wirklich fest anziehen denn sonst l÷sen sie die Propeller samt Mitnehmer von der Motorwelle und es kommt zum Absturz
Fertig verkabeltes Board:
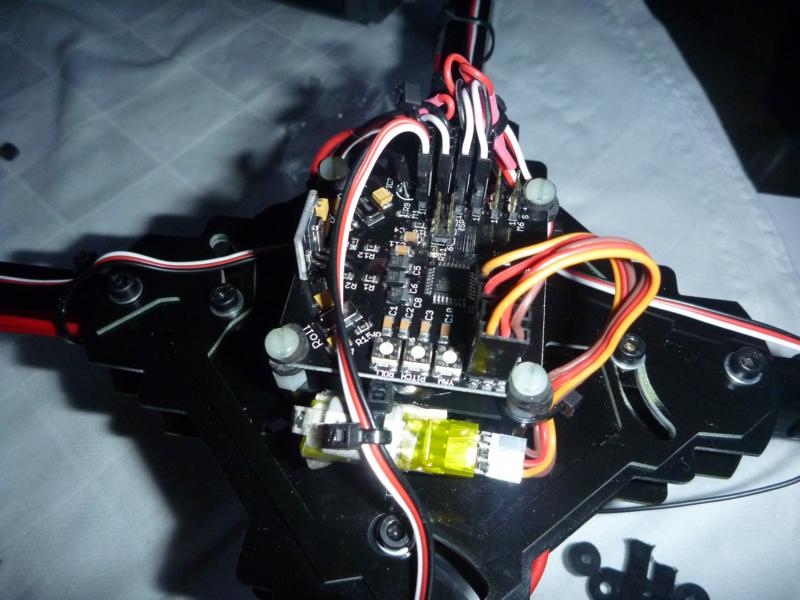
Der Empfõnger wurde mit Kabelbinder befestigt. Die Antenne wird nach unten herausgef³hrt.
Fernsteuerung einstellen
Wenn es die Fernsteuerung erlaubt f³r den Erstflug Folgendes einstellen
50 % Dual Rate auf Pitch (H÷henruder) und Roll (Querruder)
100 % auf Yaw (Seitenruder)
(Die Dual Rate verringert den maximalen Ausschlag des Servos
(oder die maximale Umdrehungszahl der Motoren)
Expo 30%, das mu▀ man f³r sich austesten.
(Exponential lõsst die Steuerbefehle weicher erscheinen, da die Kn³ppelbewegung nicht linear ausgef³hrt wird
sondern im mittleren Bereich etwas sanft verlõuft. (Am Anfang und am Ende ist die Kurve wieder stõrker!)

Um nicht gleich neue Propeller kaufen zu m³ssen habe ich den Copter "Eingepackt"
Die Schaumstoff Rohre (kosten 50 Cent im Baumarkt) Dõmpfen die Landung.
Und falls er mal auf den Kopf landet sch³tzen diese die Platine und die Propeller
Die Kunststoffverlõngerungen der Ausleger sch³tzen auch die Propeller denn damit kann er kaum umkippen
Der CD Deckel sch³tzt die Platine.
Wenn alles eingestellt ist und man sich dicher f³hlt kann man das drumherum wieder abnehmen.
Einen sch÷neren Deckel bekommt mein Copter spõter
Nun den ersten Schwebeflug auf einer gro▀en Wiese durchf³hren
.
Platine einschalten:
Gas Kn³ppel nach unten rechts halten bis die blaue LED dauerhaft leuchtet.
und den Wert des Yaw Potis langsam St³ck f³r St³ck erh÷hen bis der Copter im Flug "aufschaukelt" dann das Poti wieder ein St³ck zur³ckdrehen.
Mit dem Pitch Poti wird die Geschwindigkeit eingestellt mit der die Gyros nachregeln.
Je h÷her desto langsamer regelt er.
F³r's flotte Fliegen niedrige Werte, f³r's sanfte schweben hohe Werte.
Nach dem landen Platine wieder ausschalten:
Gas Kn³ppel nach unten links halten bis die blaue LED erlischt.
Hier mein erster Flug
https://www.youtube.com/watch?v=6KfcUz8h_gs&list=PLK9O0QvLqFPCw7M2Kgt2WE3Q4RioV0uwL
|
INFO I-Wert ist die Zeit. Wird der Wert erh÷ht werden Drifts reduziert, |
Modifikationen
07.01.2011
Ich habe den Copter bisher noch nicht fliegen k÷nnen, da der Akku noch nicht geliefert wurde.
Aber ich habe schon die ein oder andere "Verbesserung" durchgef³hrt.
Schraubensicherung an der Motorenwelle
Die beiden Madenschrauben hatte ich glatt ³bersehen.
Nun habe ich auch diese mit Schraubensicherung fixiert
.jpg)
Ankleben des Yaw Gyro
Die extra Platine die hochkant angebracht ist (die worauf sich das Yaw Gyro befindet )
ist sehr empfindlich gegen mechanische Beanspruchung,
deswegen sollte sie mit Hei▀kleber fixiert werden
.jpg)
Landungspuffer
Ich habe unter den "Kufen" eine dicke Dichtung angebracht,
so werden Landungen besser abgefedert.
.jpg)
12.01.2012
Heute kam Post vom Zollamt Gelsenkrichen
wir k÷nnen das Paket dort abholen.
Hõtte Hobby King von aussen eine Rechnung angebracht, hõtte es DHL bis zur Haut³r gebracht
und dort dann auch kassiert.
Aber so m³ssen wir mit Rechnung, Zahlungsbeleg und Ausweis zum Zollamt fahren.
12.01.2012
Propellerwuchtmaschine
Da es bei einem Copter wichtig ist die Propeller zu wuchten
habe ich kurzerhand eine Propellerwuchtmaschine gebaut.
Es gibt aber auch gute fertige Maschinen zu kaufen.
Aber man kann es gut selber bauen.
Man ben÷tigt etwas Holz, eine Welle wo der Propeller drauf befestigt wird und zwei starke Magneten.
Um den Propeller gerade einzuspannen habe ich mir dieses Luftschraubenauswuchtgerõt gekauft, kostet ca 8.-.
Man kann dieses Teil auch zwischen den Fingern halten und so pendelt der Propeller gut aus.
(Es gibt aber auch andere Wellen zu kaufen)

Genauer Auswuchten kann man aber, wenn man keinen Reibungswiederstand hat.

Ich habe mir dieses einfache Gestell gebaut.
Es sollte so hoch sein das sich der Propeller darin drehen kann.
Um die Breite einzustellen habe ich eine Gewindestange angebracht.
Man kann nat³rlich auch eine Holzleiste daf³r benutzen.
Oben habe ich 2 Magneten provisorisch angeklebt.
.
Es hat sich aber herausgestellt das normale Magneten zu schwach sind.
(Ich habe noch keine anderen deswegen sind sie hier nur provisorisch befestigt)
Es sollten schon Neodym Magnete sein ( 10 St³ck in der Gr÷▀e von 6x4 mm kosten ca 4.-)

Hier habe ich die Neodym Magnete mit Hei▀kleber angeklebt

Der Propeller wird auf die Welle geschraubt (darauf achten das beide Distanzringe sich im Propeller befinden)
und in die " Maschine " eingehõngt. Die Magnete halten die Welle nun fast wiederstandfrei.
An der schweren Seite des Props. kann man mit einem Messer vorsichtig etwas "Fleisch" abkratzen,
oder man klebt auf der leichten Seite etwas Klebeband /Tesafilm auf. Dieses muss aber gut haften.
Darauf achten das man gutes Klebeband benutzt, denn sonst fliegt es bei den ersten Umdrehungen weg
und die ganze Wuchterei war umsonst.
18.01.2012
LED Beleuchtung angebaut
Die selbstklebende LED Streifen habe ich f³r 1.- das St³ck im Modellbaugeschõft gekauft
Die Kabel wurden durch die Ausleger verlegt


Rote LEDs von der R³ckseite

Wei▀e LEDs an der Vorderseite
Hier 2 Videos von mir
https://www.youtube.com/watch?v=WaCGt9I78hw&list=PLK9O0QvLqFPCw7M2Kgt2WE3Q4RioV0uwL
https://www.youtube.com/watch?v=H34wPPn6nGE&list=PLK9O0QvLqFPCw7M2Kgt2WE3Q4RioV0uwL
Hier eine kleine Anleitung wie ihr euren X525 (oder auch einen anderen Copter) auf das neue KK2.0 umr³sten k÷nnt.
Mittlerweile gibt es das KK Board in der Version 2.1
Das neue Board bekommt Ihr bei Hobbyking direkt aus China siehe HIER (Dann dauert es aber 6-8 Wochen bis es angeliefert wird)
Leider ist beim neuen Board die flache Seite vorne. (Die Seite mit den Tastern zeigt nach hinten)
Das heisst das ihr die Stehbolzen eures Copters versetzen m³sst, falls ihr wieder ein X Copter haben wollt.
Die RC Kanõle k÷nnt ihr 1:1 ³bernehmen, aber die Motorenanordnung hat sich geõndert.
Achtung:
Am Ausgang Motor 1 muss der Regler mit allen 3 Kabeln angeschlossen werden, ansonsten wird das Board nicht mit Spannung versorgt.
KK2.0 aufschrauben und folgenderma▀en anschlie▀en
Mit dem 5. Kanal kann man den Acc Modus (Eigenstabilitõt) ein und ausschalten. Hat man keinen 5. Kanal zur Verf³gung kann man den Modus auch folgenderma▀en einstellen:
Beim Scharfschalten des Boards (also Gas runter und Yaw rechts) zeitgleich den Roll (Querruderkn³ppel) nach rechts halten. (Das geht auch beim Ausschalten des Boards)
Im Normalmodus kann man schalten wenn man anstatt Roll recht Roll links hõlt.
Das Umschalten des Flugmodus per Fernbedienung sollte aus Sicherheitsgr³nden auf dem Boden geschehen!
Ob man den Modus per Funkanal oder per Stickbewegung einschalten will kann man im Men³ "Mode Setting" bei Self-Level entweder Aux oder Stick angeben
Wollt ihr die Akkuspannung durch das Board ³berwachen lassen so m³sst ihr von Eurer Stromverteilerplatine ein Kabel (+) an den hier gezeigten L÷tpad anl÷ten.
Achtet darauf das ihr hier keinen Kurzschluss erzeugt und schaut euch die L÷tung noch einmal ganz genau an bevor ihr den Akku anklemmt!
Im Men³ "Misc-Setting" unter "Alarm /1/10 Volt k÷nnt ihr nun die Spannung angeben wann der angeschlossene Piepser euch alarmieren soll.
Wenn ihr eine Warnschwelle von 10.8 Volt eingeben wollt, m³sst ihr dort 108 eintragen ( Das Komma wird nicht mit eingetragen)
4 Sachen m³sst ihr nun noch mindestens tun damit ihr losfliegen k÷nnt ( Die Propeller sollten dabei besser noch abmontiert sein)
1. Gasweg einlernen:
Dazu stellt ihr den Sender auf Vollgas und schaltet ihn ein.
Nun haltet ihr die Tasten S1 und S4 gedr³ckt und klemmt den Akku an.
Nach dem Piepton stellt ihr den Gaskn³pel auf 0, nun ert÷nt ein Bestõtigungston.
Erst jetzt k÷nnt ihr die beiden Tasten wieder los lassen.
2. Sensor kalibrieren:
Daszu stellt ihr den Copter auf eine wirklich ebene Oberflõche (Der K³chenherd hat sich hier bezahlt gemacht, da er eigentlich immer 100% ausgerichtet ist)
Spannung einschalten, ins Men³ "Sensor Calibration" gehen und durch Dr³cken von S4 den Kalibriervorgang starten. ACHTUNG, dabei den Copter nicht ber³hren oder bewegen!
3. Motorlayout einstellen:
Nun m³sst ihr dem Board nur noch sagen was f³r einen Copter ihr hier habt. In diesem Fall ein Quadrocopter X Typ .
Dort k÷nnt ihr auch sehen wie die Motoren angeschlossen werden und wie herum sie drehen m³ssen.
4. Empfõnger Test:
Dazu geht ihr ins Men³: "Receiver Test", hier wird euch angezeigt welche Fernsteuerbefehle das Board erkennt.
Im Grundzustand sollte hier 0 stehen, eventuell die Trimmung anpassen
Schaut hier auch nach den korrekten Kn³ppelwegen.
Sollte ein Kn³ppelweg falsch herum sein m³sst ihr ihn am Sender umkehren. Vergesst nicht den Schaltkanal zu testen
Neue Software flashen
(Nach dem Flashen muss man die Einstellungen oben wieder durchf³hren)
Die Boards werden zur Zeit mit einer 1.2er Software ausgeliefert.
Es gibt aber schon eine 1.6er Software. Bei dieser soll der Copter im ACC Modus noch ruhiger fliegen.
Auch ist hier eine Kameragimbalansteuerung integriert.
Das Flashen lõuft eigentlich ab wie oben beim kk Board schon beschrieben.
Aktuellen Flashtool herunterladen, Treiber installieren, Board auswõhlen und Programmieradapter auswõhlen.
Programmieren kann man mit dem KK Programmierer.
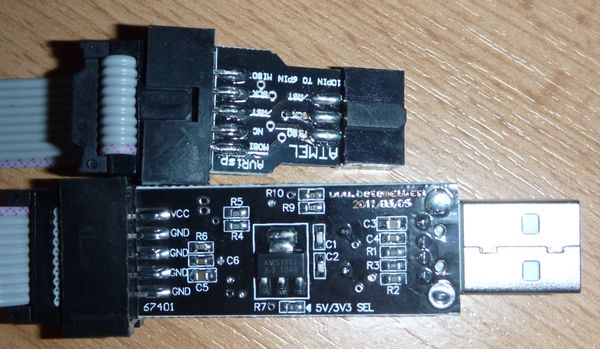
Achtung beim Aufstecken des Programmieradapters!
Habt ihr den am USB nun richtig aufgesteckt leuchtet das LC Display des Boards!
Hier 2 Bilder wie er richtig gesteckt ist
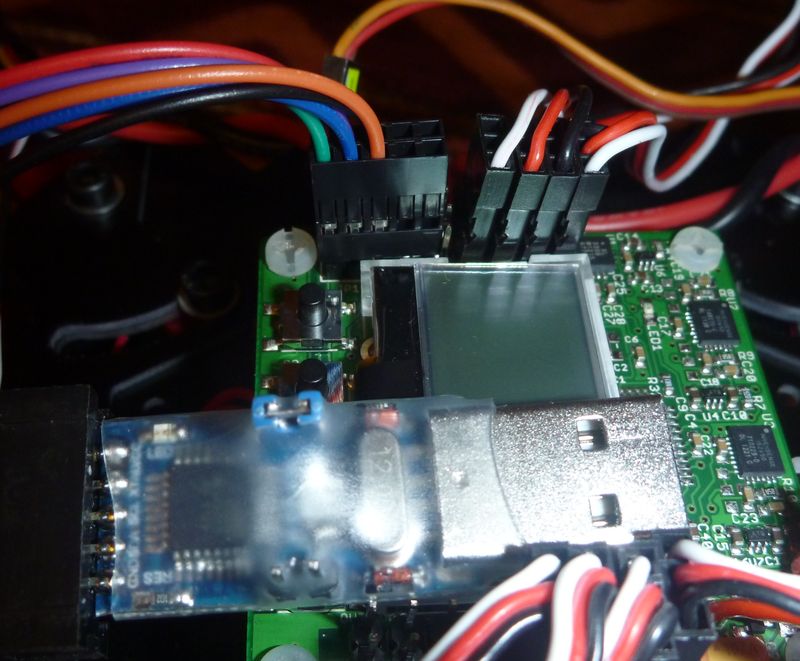
Original KK Programmieradapter ( hier am besten das Kabel f³r den 5. Kanal entfernen damit der Stecker besser passt)
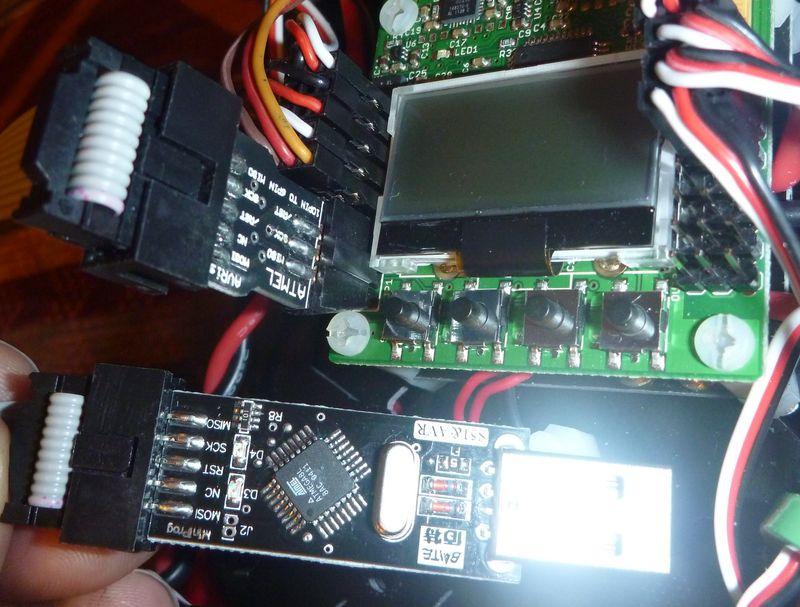
Programmieradapter aus den Link oben
Einstellwerte verschiedener X525 X Copter mit KK2.0 Board.
Wenn ihr ein gut fliegenden X525 habt sendet mir doch bitte Eure Werte zu.
andy.oldy@gmx.de
Meine Einstellung mit KK2.0 Board.
| Axis Roll / Pitch | Axis Yaw | Self Level | Stick Scaling | ||
| P Gain = 89 | 50 | P Gain = 60 | 30 | ||
| P Limit =85 | 20 | P Limit = 16 | 30 | ||
| I Gain = 50 | 50 | ACC Trim Roll * | 50 | ||
| I Limit = 20 | 10 | ACC Trim Pitch * | 90 |
*ACC Trim nur verstellen wenn der Copter im ACC Modus wegdriftet. Werte ins + bringen wenn der Copter nach vorne und oder nach links driftet.
Fliegt der Copter zur³ck oder nach rechts Negative Werte eintragen
Thorsten (Toto) X525 Einstellwerte
Besonderes: Die Motoren sind direkt auf den Armen befestigt (Ohne die Motorhalter)
Totos Tipps je kleiner der Copter umso gr÷▀er sollen die Werte sein.
| Axis Roll / Pitch | Axis Yaw | Self Level | Stick Scaling | ||
| P Gain = 130 | 150 | P Gain = 60 | 30 | ||
| P Limit =80 | 20 | P Limit = 16 | 30 | ||
| I Gain = 50 | 50 | 55 | |||
| I Limit = 20 | 10 | 90 |
Hier noch ein Foto vom X525 mit KK2.0

Links die Euch beim bauen weiterhelfen k÷nnen
Ersatzteile aus Norwegen (Achtet auf den Umrechnungskurs!)
Blog ³ber den Bau einen X525 von Marcus
KK2.0 Links
Noch eine gute Anleitung auf deutsch
Weitere Interessante links
Anleitungt wie man mit neuen Akkus umgehen sollte damit man lange Spa▀ damit hat
Zu Verkaufen
Ich trenne mich von ein paar meiner Sachen. Bei Interesse einfach eine E-Mail
1x X525 Rahmen komplett ohne Elektronik