Bei R³ckfragen andy.oldy@gmx.de
Zur³ck zur Quadrocopter Hauptseite
Mein Hexacopter Projekt
Bei R³ckfragen andy.oldy@gmx.de
Zur³ck zur Quadrocopter Hauptseite
![]() Datenschutzerklõrung
Datenschutzerklõrung
Mai 2012
Nun m÷chte ich mir einen Hexacopter zulegen, dieser soll eine bewegbare Kamerahalterung haben.
Der Copter:
Ich habe diesen hier ausgesucht:
http://www.goodluckbuy.com/kk-mk-multicopter-hex-rotor-multi-hexacopter-arf-set-mwc-se-flight-control-multicopter-650mm.html
Die Motoren und Regler kenne ich schon von meinem X525 und die laufen da sehr gut.
Das Wii Board habe ich auch schon an einem anderen Copter und das ist auch recht gut.
Kamerahalterung:
Zuerst habe ich mir die Halterung von Quadframe ausgesucht: http://quadframe.com/collections/frontpage/products/g01k
aber die ist von der Gr÷▀e her sehr eingeschrõnkt (es passen ja nur eine Gopro, meine Camone oder vergleichbare kleine Kameras dran).
Nun habe ich mir diese hier von Flyduino gekauft: http://flyduino.net/2-Axis-GF-Gimbal
(die selbe gibt es auch direkt in China,
siehed hier http://www.goodluckbuy.com/universal-two-axie-stability-augmentation-aerial-tilt-ptz-camera-mount-with-shutter.html )
Diese Halterung macht einen guten Eindruck und meine Panasonic FT-2 passt auch wunderbar drauf.
Man ben÷tigt nur noch 2 (oder 3) Servos dazu
Akkus:
Um wieder auf eine Flugzeit von 6-7 Minuten zu kommen ben÷tige ich stõrkere Akkus.
Ich habe mir 2 St³ck von den 4000er Turnigy bestellt
http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=9510
Zusammenbau des Copters.
Der Copter wurde direkt zu mir nach Hause geliefert.
Was sofort auffiel ist das andere Motoren verbaut sind, anstatt XXD 2212 sind es XXD 2208.

Der Inhalt des Paketes sah spektakulõr aus.

Was mir hier besonders gefõllt ist, das die Propeller direkt auf die Motorenwelle geschraubt werden.

So wie es aussieht haben die den Copter komplett zusammengebaut, verkabelt und zum Transport wieder auseinander geschraubt.
Das Zusammenbauen war in 3 Stunden erledigt
Zuerst habe ich die Arme sortiert
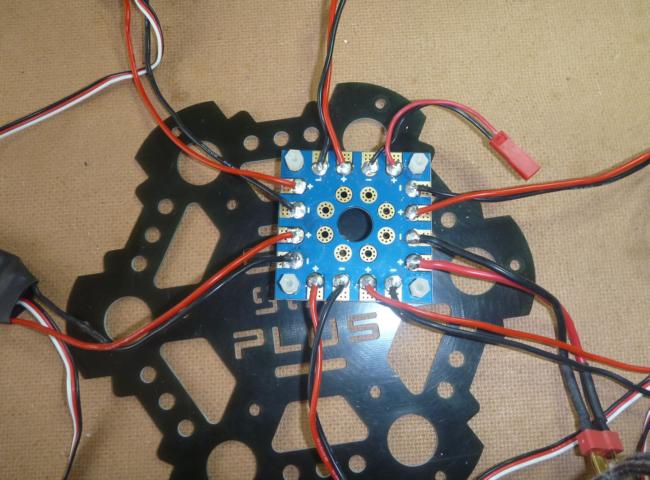

Dann habe ich die Stromverteilerplatine angeschraubt und dann die 6 Motorarme
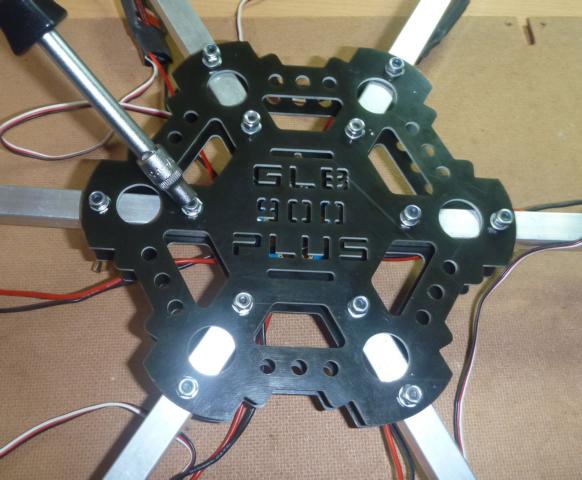
Vorsichtshalber habe ich auch die schon angebrachten Schrauben mit Schraubensicherung gesichert.

Das Board war schon auf einen HEX 6 X Copter geflasht
Die 6 Regler habe ich mit Hilfe meines Adapters alle gleichzeitig programmiert.
Die 7 Stiftleisten sind von der Unterseite jeweils verbunden,
so kann ich alle 6 Regler gleichzeitig am Gaskanal des Empfõngers anklemmen.
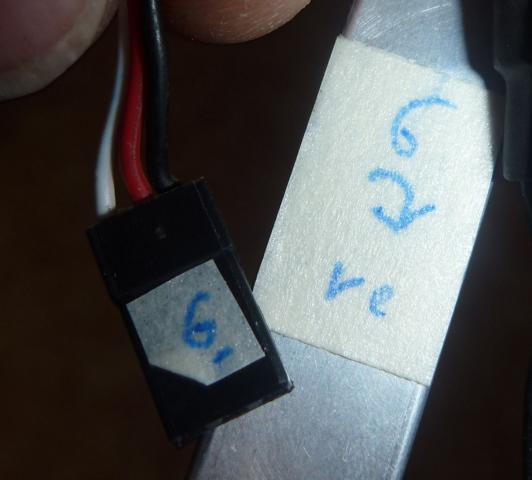
Damit ich auch wei▀ wo was ist und wo was hin muss, habe ich mir auf jeden Motorarm die Drehrichtung, die Position und die Steckerbelegung geschrieben.
Auf den Regler Stecker habe ich auch den Anschlusspin des Boards geschrieben.
Anbau der Kamerahalterung:

Der Aufbau war recht einfach und muss nicht erklõrt werden.
Ich habe Alu U-Profil unter dem Copter angebracht um so die Kamerahalterung anzubringen

So habe ich die M÷glichkeit den Schwerpunkt mal zu verschieben.

Die Kamerahalterung habe ich mit Gummipuffern befestigt

So sieht der Copter fertig aus

Die Landef³▀e sind noch nicht optimal weil sie bei der Lõnge einfach zu weich sind.
F³r die ersten Flugversuche wird es aber gehen.
Software:
Ich benutze Multiwii:dev_20120606
Ich habe die Software sofort ³berschrieben, deswegen wei▀ ich nicht wie der Copter im Original eingestellt war (õrgert mich nun etwas)
Im Sketch (Arduino) unter config.h folgendes einstellen:
#define HEX6X (Der Coptertyp)
#define CRIUS_SE // Crius MultiWii SE ( Das Board)
#define MOTOR_STOP (Weil ich nicht m÷chte das die Motoren beim Einschaltern der Platine anlaufen)
#define A0_A1_PIN_HEX (damit die RC Anlage bei meinen Standard Empfõnger (Kein Summensignal) funktioniert)
Dann muss man allerdings Motor 5 und Motor 6 an A0 und A1 anklemmen!
Da ich aber die Kameraausgleichfunktion verwenden will benutze ich nun das Summensignal
also bleibt es bei : //#define A0_A1_PIN_HEX
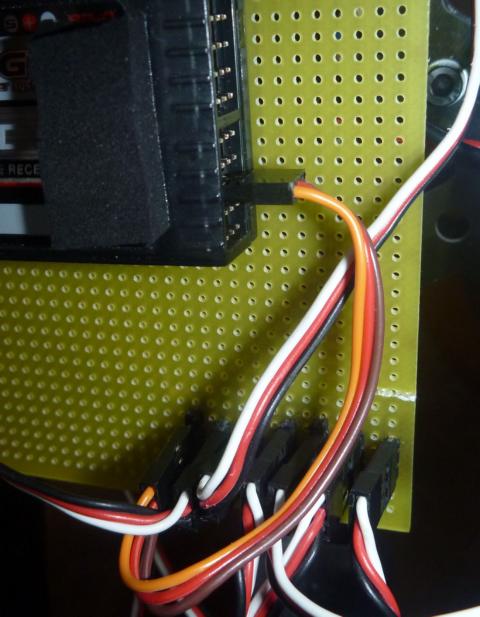
Ich muss nun das Summensignal im Sketch einschalten, also
#define SERIAL_SUM_PPM PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,AUX3,AUX4 //For Graupner/Spektrum
Nun muss ich nur noch den Summensignalausgang meines Empfõngers (Kanal 8) an Pin 2 des Boards anklemmen
und den Empfõnger auf Summensignal einstellen ( das geht im Telemetriemen³ meiner Funke)
Damit die Kamera Stabilisierung funktioniert muss diese noch eingeschaltet werden:
#define SERVO_TILT
Meine Servos liefen falsch herum, also den Wert im Sketch noch invertieren (ein Minus eintragen):
#define TILT_ROLL_PROP -10
Die originale Einstellung sah so aus:
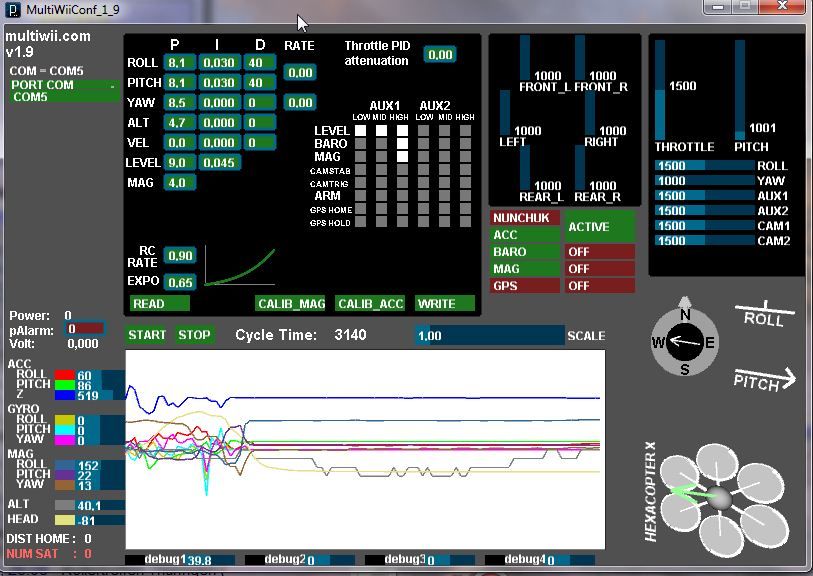
Ich bin mit dieser Einstellung nie geflogen.
Nach dem Update sah meine erste Einstellung so aus:
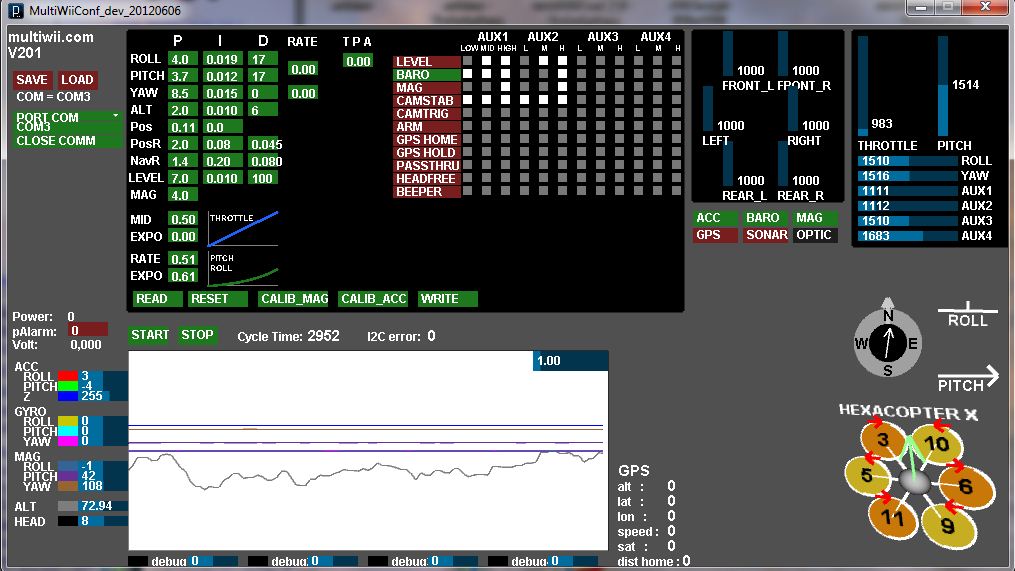
Bei der neuen Version wird einem auch angezeigt in welche Richtung die Motoren laufen m³ssen und an welchen Pins sie angeschlossen werden.
Also ACC trimmen, Kompass kalibrieren und gew³nschte Funktionen anwõhlen (AUX 1-AUX4),
Propeller wuchten. Erste Trocken³bungen ohne Propeller machen.Wenn alles OK, Propeller anschrauben, noch einmal alles testen,
nun kann es raus gehen zum ersten Flugtest.
Update 19.02.2013
Irgendwie habe ich diesen Hexacopter mit dem Wii Board nie so richtig zum Laufen gebracht.
Und da Modellbau ja etwas mit bauen zu tun hat, habe ich alles wieder umgebaut
Die aktuellen Infos zu meinem Hexacopter findet ihr HIER