Bei Rückfragen andy.oldy@gmx.de
Zurück zur Quadrocopter Hauptseite
Mein Quadrocopter Projekt
Bei Rückfragen andy.oldy@gmx.de
Zurück zur Quadrocopter Hauptseite
![]() Datenschutzerklärung
Datenschutzerklärung
März 2012
Update 08.07.2012
Ich muss sagen das Quadrocopter bauen und fliegen macht irgendwie süchtig.
Deswegen ging mir das Angebot von Goodluckbuy nicht mehr aus den Sinn.
Ein kleiner Copter nicht nur für Indoor, mit einem fast voll ausgestattetem Board ( inklusiv Kompass, Barometer und Ultraschallsensor)
und einem Carbon Rahmen.
Innerhalb von 4 Wochen war er auch hier
Butterfly X250 Mini Quad Copter Carbon ARF Set mit Rabbit Contoller
Der Copter kam auch schon so gut wie fertig aufgebaut hier an.

Alles war verkabelt, es fehlten nur noch wenige Handgriffe bis zum Erstflug.
Also habe ich die Kabel ordentlich verlegt, diverse Schrauben mit Schraubensicherung versehen, den Emnpfänger und den Akku (910mAh) angeschlossen, die Propeller gewuchtet und angebracht.
Zum Glück habe ich die Verkabelung noch einmal kontrolliert, denn das Kabel zur Akku Überwachung wurde falsch herum aufgesteckt! Hätte ich den LiPo angeschlossen hätte es bestimmt das Board zerstört!
So ist es richtig: Das blaue Kabel zeigt nach innen.
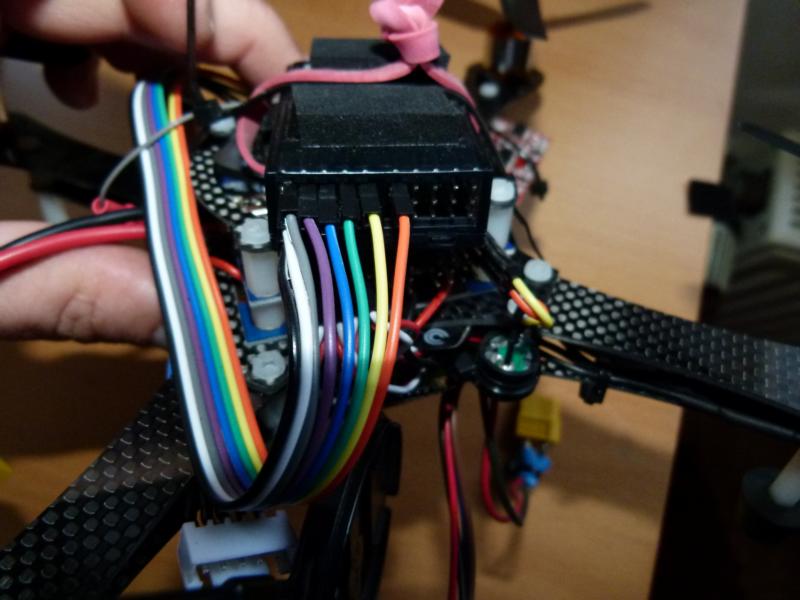
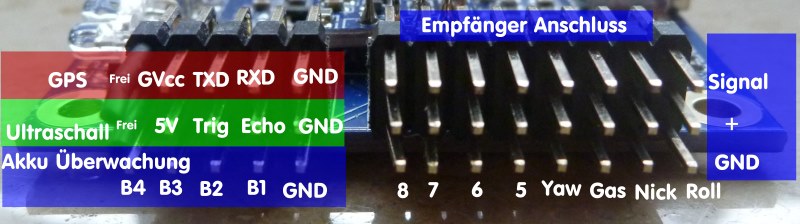
Empfängeranschluss

Hier mal ein Größenvergleich
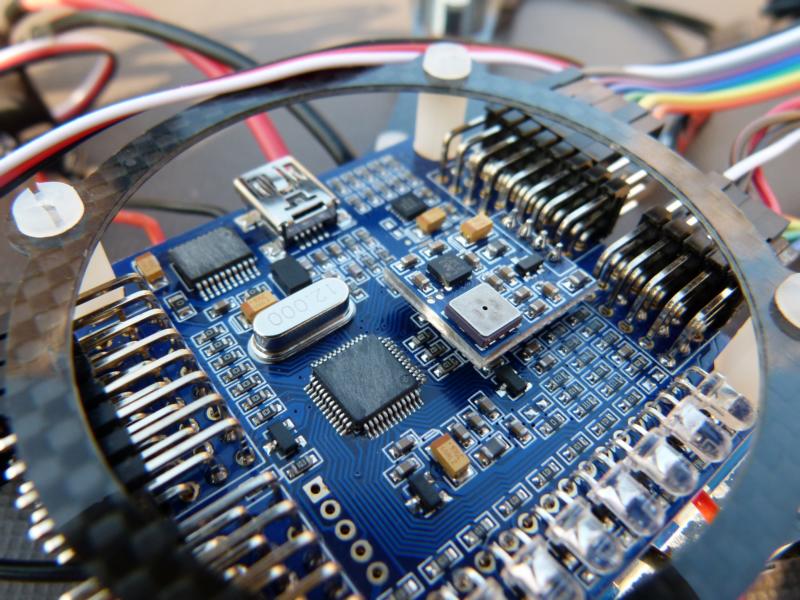
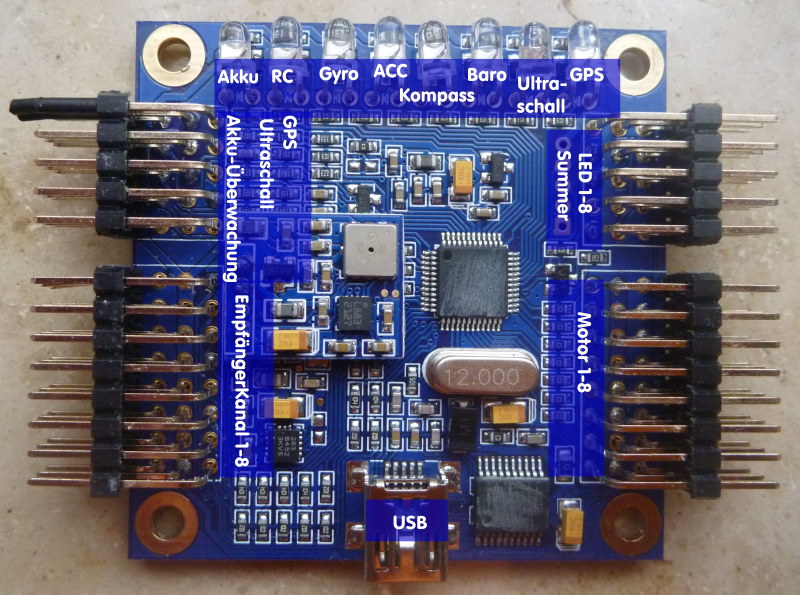
Hier das Rabbit Board. Ein USB Anschluss zum Updaten der Firmware ist bereits bestückt. Das Barometer (das ist das quadratische silberne Bauteil auf der kleinen aufgesetzten Zusatzplatine neben den Stiftleisten) sollte mit einem offenporigen Schaumstoff abgedeckt werden damit das Barometer durch den Propellerwind keine falschen Messwerte liefert.
Die 8 LEDs an der Platinenvorderseite sind nicht nur der Optik wegen verbaut, sie zeigen Statusmeldungen des Boards an ( z.B. welche Sensoren aktiviert wurden).
GPS könnte auch noch mit angeschlossen werden.
Regler anlernen mal ganz einfach:
Funktioniert so nur bei Hobywing (oder kompatiblen) Reglern!
Einfach 2 nebenliegende Pins auf dem Board brücken ( TX mit RX vom Anschluss für dass GPS) und Batterie anklemmen,
abwarten bis die Regler piepsen, Brücke wieder entfernen, fertig.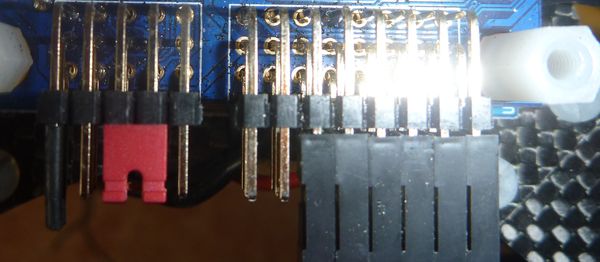
Diese beiden Pins (wo hier der Jumper steckt) müssen für das Anlernen des Gasweges gebrückt werden.
Die Platine lernt den Reglern einen Weg von 1100-1900 an. Diese Werte sollte eure RC Anlage auch übertragen.
Dieses könnt ihr in der Rabbit Software kontrollieren. Stimmen die Werte nicht müsst ihr diese in euren Sender anpassen.
Der Gasweg muss als einzigster Kanal ein minimum Wert von <1100 haben (1020-1090)
Bei nicht Hobbywing Reglern lernt den Gasweg so an wie es in der Bedienungsanleitung steht
Hier mein Video dazu
Die Software ließ sich bei mir nur auf einem PC mit Win XP installieren. ( Auf meinem Win 7, 64 Bit läuft sie nicht)
Wenn man das Board am PC anklemmt sollte man zusätzlich noch den Akku am Copter mit anklemmen.
Mein Copter flog aber auch ohne jeglichen Software Eingriff schon sehr gut!
ACHTUNG beim Updaten des Boards kann es dazu kommen das die Motoren anlaufen! Den Copter so aufstellen das die Propeller ungehindert drehen können. Eventuell auch den Copter mit einer Hand festhalten!
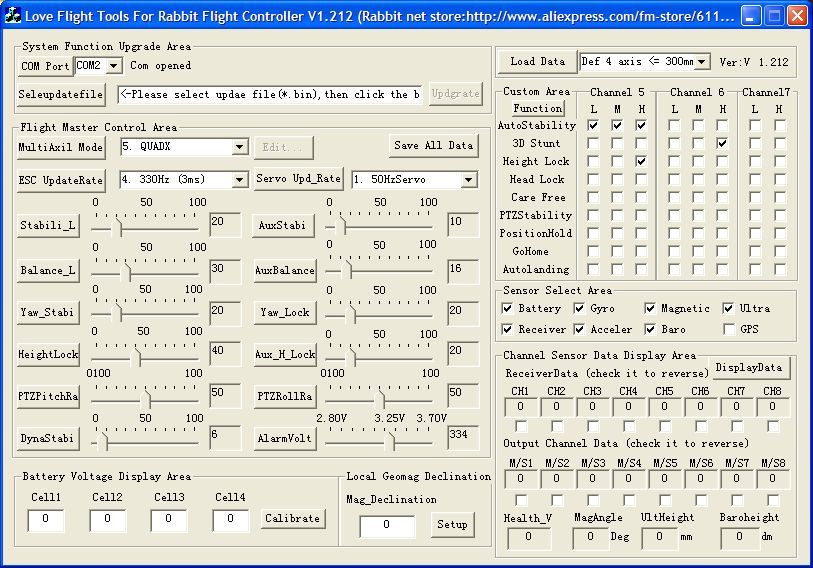
Hier zeige ich mal das Programmierfenster. Hier stellt man alle Funktionen des Rabbit ein.
Update 08.07.2012: Achtung ab V1.1212 hat sich das Fenster verändert!
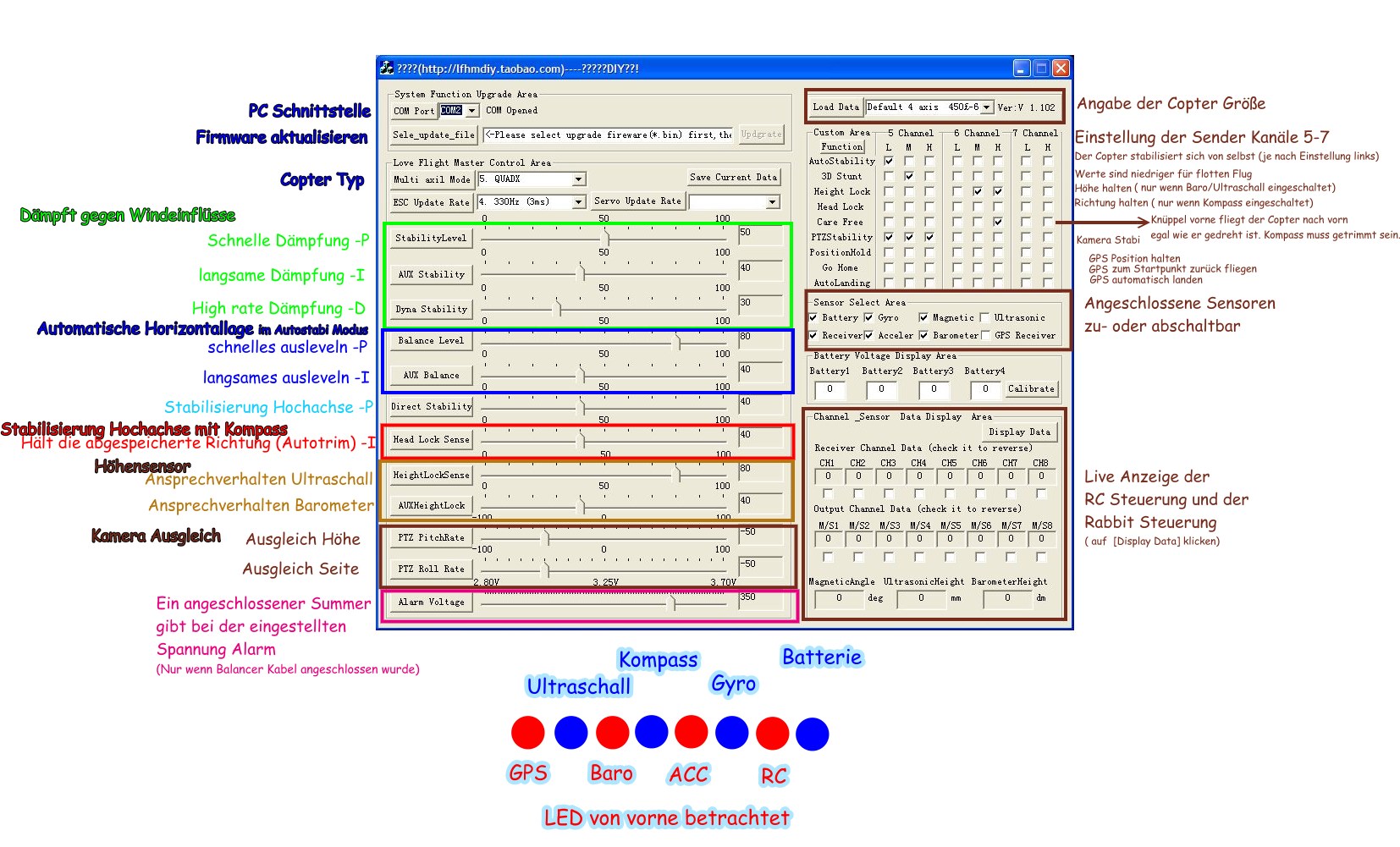
Rechts kann man einstellen welche Funktion des Rabbits auf welchen Senderkanal gelegt werden soll.
Am besten man legt sie jeweils auf einen 3 Stufen Schalter ( Aus = L, Mittenstellung = M und An = H ) hat man nur einen 2 Stufen Schalter zur Verfügung kann man nur die Positionen L und H belegen.
Wenn ein Sensor nicht bestückt ist ( z.b. der externe Ultraschallsensor) dann darf man den rechts auch nicht anklicken, denn dann lässt sich das Board nicht scharf stellen. Also nur die Häkchen im Bereich [Sensor Select Area] anklicken die sich auch auf den Board befinden!
Die ersten 6 Schieber muss man einstellen denn die Regeln die Grundfunktion des Copters.
Meistens sind schon Werte abgespeichert, sollte alles auf 0 sein dann mit mittleren Werten beginnen (40%)
Wenn man Werte verändern will dann sollte man immer nur 1 Wert ändern und schauen wie sich der Copter verhält.
Dann weiter zum nächsten Schieber.
Die Schieber 7-12 müssen nur eingestellt werden wenn man die entsprechende Funktion auch nutzt.
Autostabi Modus heisst, der Copter bewegt sich in die Neutrallage wenn die Knüppel am Sender losgelassen werden
( Mittelstellung, außer Gas natürlich ;-))
Der Höhensensor spricht an wenn man den Gasknüppel nicht mehr bewegt, dann hält der Copter die Höhe (man kann den Copter aber weiterhin lenken) . Aber Achtung ! wenn man nur etwas am Gasknüppel kommt wird die Funktion wieder ausgeschaltet!
Durch den Ultraschallsensor soll der Copter in Höhen von bis zu 2 Metern sehr exakt die Höhe halten (fast CM genau)
In höheren Höhen kommt das Barometer zum Einsatz.
Kamerastabilisierung: Mit einer speziellen Kamerahalterung kann das Board die Copter Bewegungen ( rauf/runter und rechts/links) so ausgleichen dass man immer den selben Ausschnitt hat, egal wie weit der Copter in die ein oder andere Richtung gekippt ist.
Die beiden dazu benötigten Servos müssen an CH M6 und M7 angeschlossen werden.
Will man die Kamera darüber hinaus auch noch per Fernbedienung steuern muß der Drehreglerausgang des Empfängers an Kanal 7 des Boards angeschlossen werden.
Care Free Funktion heisst soviel das der Copter immer vom Piloten nach VORNE wegfliegt solange man den Pitch Knüppel nach vorne drückt. Dabei ist es egal welche Seite des Copters nach vorne zeigt. Bewegt man den Knüppel nach rechts dann fliegt der Copter auch nach rechts, auch wenn die Vorderseite des Copters zum Piloten zeigt. Diese Funktion ist für Anfänger recht gut, aber auch wenn der Copter so weit weg ist das man seine Lage nicht mehr erkennen kann. Care Free einschalten, Knüppel zu sich ziehen und der Copter kommt zurück.
Aber Achtung!!! Das funktioniert nur wenn der Copter vor dem Piloten fliegt! Der Pilot darf sich nicht drehen, denn dann kommt man durcheinander. Auch muss für diese Funktion der Kompass gut kalibriert sein und auch gut funktionieren!
Denn starke Stromquellen oder schlecht verlegtes Kabel können den Kompass irritieren!
Seit dem neuen Software Update (V1.202) wird leider mein rotes Ultraschall Board nicht mehr erkannt.
Das blaue Board soll wohl funktionieren ( es kostet keine 3.- € inclusiv Versand aus China).
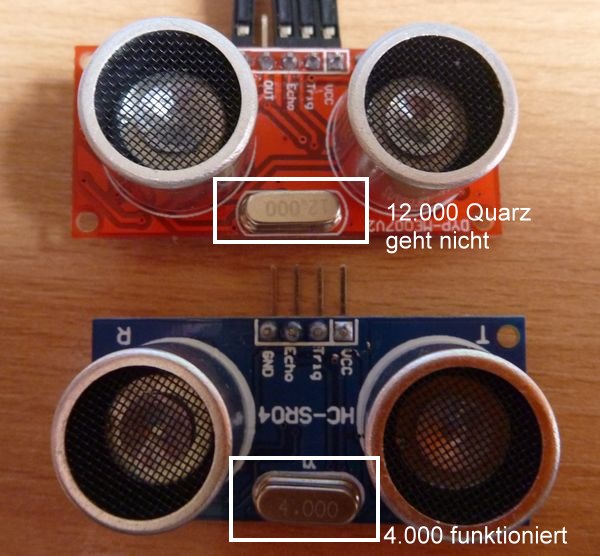
Die Boards mit den 12.000er Quarz funktionieren leider nicht. Nur die Boards mit einem 4.000er Quarz funktionieren.
Platinenansicht von oben
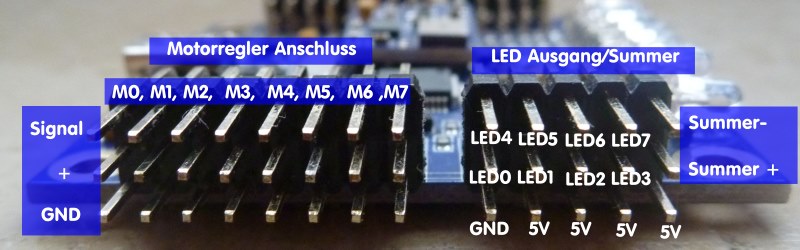
Belegung rechte Seite
Belegung linke Seite
Akku Überwachung kalibrieren.
Man muss die Spannung der einzelnen Zellen sehr genau messen. Ich habe dafür ein recht gutes Messgerät.
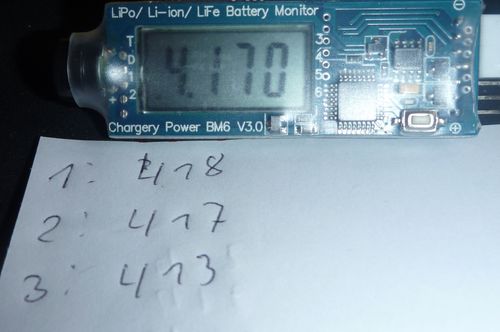
Die gemessenen Werte nun notieren (nur 3 Stellen), dann verbindet man das Board mit dem PC
und klemmt den Balanceranschluss ans Rabbit Board

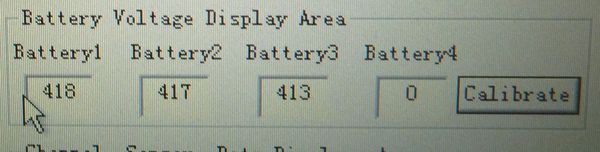
Nun tippt man die Werte (in der richtigen Reihenfolge) in die dementsprechenden Kästchen ein.
Danach klickt man auf [Calibrate] und die Werte werden übernommen.
Nun misst das Rabbit Board sehr genau die Zellenspannung und gibt dann ein Piepston ab (bei angeschlossenem Summer)
wenn die eingestellte Spannung an einer der Zellen erreicht wird.
Die ersten Flugversuche sind vielversprechend.
Die Sache mit Care Free, Höhe halten und Richtung halten habe ich aber auch noch nicht im Griff.
Autolanding Funktion (geht noch nicht so wirklich)
Hinweise
Regler:
Die Mystery 30 A Regler (die gelben) scheinen nicht mit dem Rabbit Board zu laufen
Turnigy 18a Plush sollen gut funktionieren
Update 08.07.2012
Neue Software Version
Bei der neuen Softwareversion (V1.212)
hat sich auch das Softwarefenster gegenüber der obigen Zeichnung verändert, so wird nun auch bei kleineren Bildschirmen alles angezeigt.
Update 27.01.2013
Mit einer Software Version größer 1.220 funktioniert der alte Barometer (hier auf meinem Board verbaut) nicht mehr!
Die interessanteste Neuheit ist wohl folgendes: Wenn der 3D Modus und der Auto Stability Modus eingeschaltet sind, soll der Copter
selbstständig einen Flip machen und sich wieder ausbalancieren sobald man den Knüppel ( Nick oder Roll) kurzzeitig
auf Vollanschlag bewegt und dann wieder auf Mittelstellung stellt.
Für den Flip wird eine Mindestflughöhe von 10 Metern empfohlen!
Ausserdem muß man den Copter erst kalibrieren, ansonsten lässt er sich nicht scharf schalten.
Und bei der GPS Variante schaltet er selbstständig die "Go Home" Funktion ein sobald der Empfänger kein RC Signal mehr erhält (Fail Safe)
Links
Anleitung auf Englisch
USB Treiber für XP
Firmware 1.212 ( Achtung die Motoren könnten beim Updaten mit Vollgas anlaufen!)
Baubericht derFrickler
Forumsbeitrag im FPV Forum Viele Infos auf meiner Seite kommen von daher, vielen Dank dafür.
Wiki
Modifiziertes PC Tool (Bessere Anzeige auf kleinen Laptops )